Шаговый двигатель: что это такое и как он работает – принцип работы и устройство
Рассмотрим «сердце» фрезеровочных, шлифовальных, универсальных и многих других станков. Под прицелом внимания – шаговый двигатель: устройство и принцип работы, схема и сферы применения, типы конструкции и варианты программирования. Расскажем все эти и другие важные моменты, чтобы вы понимали, что он из себя представляет и какую его модель выбрать в соответствии со спецификой решаемых задач.
Сразу отметим, что предмет нашего интереса сегодня используется не только в сложном оборудовании, решающем ответственные задачи, но и в сравнительно простых производственных механизмах и даже в бытовых приборах. Он востребован во всех тех случаях, когда необходимо поддерживать достаточно скоростное вращение вала, одновременно сочетая его с точным позиционированием, и поэтому будет оставаться актуальным еще долгие годы.
Что такое шаговый двигатель
Согласно наиболее популярному определению, это машина, которая преобразует электрическую энергию (ее она получает из сети) в механическую осуществляя дискретные (внимание, не непрерывные, это важно) перемещения ротора. Причем после каждого такого действия положение динамической части фиксируется.
Все отдельные передвижения одинаковой величины, и вместе они формируют полный оборот (цикл). Поэтому, подсчитав их количество, можно без труда и с высокой точностью вычислить абсолютную позицию инструмента. Общее их число, кстати, зависит от ряда моментов: характер подключения, вид устройства, способ задания команд и другие факторы.
Принцип работы шагового электродвигателя
- На клеммы подается напряжение, благодаря которому специальные щетки начинают вращаться.
- Под воздействием входящих импульсов ротор устанавливается в начальное положение, а затем перемещается под одним и тем же углом.
- Микроконтроллер (в большинстве случаев, хотя возможна и другая внешняя цепь управления) приводит в действие зубчатые электромагниты. Тот из них, к которому прикладывают энергию, притягивает шестерню, обеспечивая тем самым поворот вала.
- Остальные магниты по умолчанию выровнены относительно ведущего, поэтому они сдвигаются вместе с ним по направлению к очередной детали.
- Шестеренка вращается за счет переключения электромагнитов по порядку – от главного к следующему и так далее. При этом она выравнивается относительно предыдущего колеса, что завершает цикл.
Шаг шагового двигателя – это описанный выше алгоритм, и он повторяется необходимое для выполнения технологической операции количество раз.
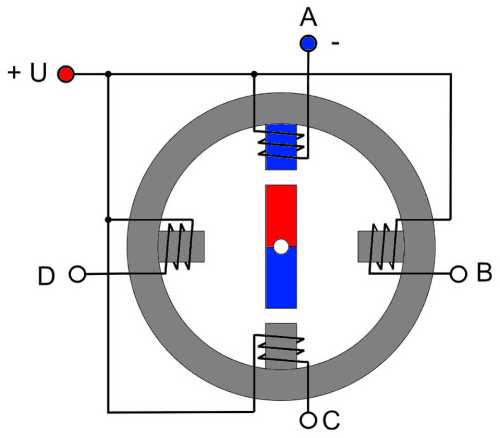
Представление о внешнем виде и характере функционирования дополнит следующий рисунок:
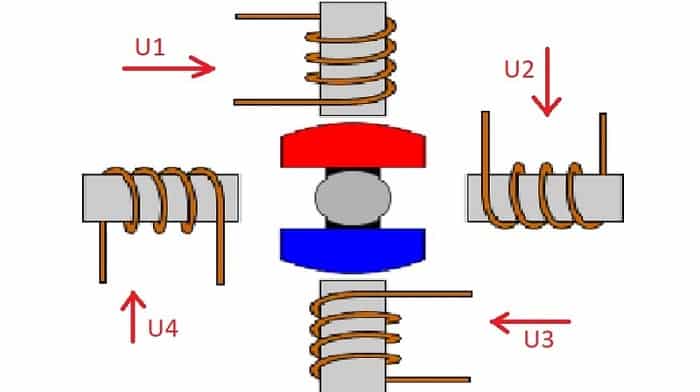
Из него ясно, что к статору относятся четыре обмотки, расположенные крестообразно, то есть под углом в 90 0 друг к другу. Отсюда понятно, что и дискретное движение будет осуществляться на такую же величину градусов. Если напряжение подавать поочередно – U1, U2, U3 и так далее – ротор сделает полный оборот, а затем пойдет на второй круг, то есть начнет вращаться – до тех пор, пока его не потребуется остановить. Ну а, чтобы изменить направление его движения, достаточно задействовать витки в обратном порядке.
Какие бывают шаговые двигатели: рассмотрим их разновидности
Режимы работы мотора определяют 2 характеристики: величина шага и усилие, прикладываемое для перемещения. Варьировать их можно, меняя метод подключения, строение обмоток или вала.
Соответственно, классификация приводов осуществляется по следующим параметрам:
- По конструкции ротора – его строение играет ключевую роль, так как от него зависит специфика взаимодействия с электромагнитным полем статора. Выделяют 3 варианта, причем каждый из них мы рассмотрим ниже, со всеми особенностями, плюсами и минусами.
- По виду (числу обмоток) – с ростом их количества вращение становится более плавным, но одновременно увеличивается и стоимость силового агрегата, хотя крутящий момент остается неизменным. Могут быть уни- и биполярными, в первом случае подключаются с ответвлением от средней точки, во втором – через 4 выхода.
Теперь обратим внимание на строение вала.
Шаговые приводы с переменным магнитным сопротивлением
Как следует хотя бы из названия, собственный источник постоянного поля у него отсутствует; кроме того, его ротор сделан из магнитомягкого материала и отличается зубчатой формой. Через ближайшие к статору участки контакта и осуществляется замыкание – с притяжением к полюсам, обеспечивающее дискретные движения. По своему исполнению он похож на шестерню, в которой сила вращения появляется за счет противоположных пар и попеременного протекания тока.
Ключевое преимущество – нет стопорящего момента, ведь поле, в других случаях способное воздействовать на арматуру, банально отсутствует. Вы получаете синхронный силовой агрегат, в котором ротор и статор поворачиваются одновременно и в унисон.
Обладая теми же размерами, что и другие разновидности, данные модели развивают меньший крутящий момент. Перемещение осуществляется на 5-15 градусов, а это сравнительно грубо и, зачастую, неточно. Так объясняется несколько ограниченная сфера применения реактивного шагового двигателя: где используется мотор данного типа, так в специфических станках, все детали которых производитель изготавливает самостоятельно.
С постоянными магнитами
Опять же, сразу ясно, в чем их особенность – в наличии собственного источника постоянного поля, являющегося основой подвижного элемента и содержащего 2 и более полюсов. Именно последние и обеспечивают вращение ротора за счет подачи напряжения на обмотки и притяжения/отталкивания.
Перемещение может осуществляться либо полностью перпендикулярно предыдущему положению, либо наполовину; увеличивая число магнитных пар, можно регулировать длину, а значит и количество дискретных движений, доводя их общее число до 48 за полный оборот. Это позволяет очень точно устанавливать рабочий инструмент в нужное место и является конкурентным преимуществом силового агрегата.
Гибридные
Конструкция шагового двигателя этого типа была разработана, чтобы объединить достоинства двух предыдущих. Представляет собой цилиндрический источник поля, намагниченный продольно, то есть пару полюсов с особенными поверхностями – с нанесенными зубцами. Последние обеспечивают отличное удерживание, не снижая крутящий момент.
- малый шаг – 0,9-50 – что позволяет прецизионное позиционирование за счет большого количества дискретных перемещений (до 400 за один цикл);
- высокая скорость и плавность работы.
Да, они дороже двух предыдущих видов, так как сложнее в изготовлении, но это относительный минус. Благодаря своим преимуществам это наиболее распространенные сегодня варианты, использующиеся в самых ответственных случаях: устанавливаются в ЧПУ-станках, в приборах современной робототехники, на медицинском и офисном оборудовании.
Принцип управления шаговым двигателем
Выделяют 3 основных режима, задаваемых драйвером, то есть чипом, посылающим сигналы. Вот они:
- полно-,
- полу-,
- и микрошаговый.
Каждый из них обладает своими особенностями. Первый из них мы уже косвенно описывали выше, и он сводится к поочередной коммутации фаз; причем только одна из них в любой из моментов может быть подключена к источнику – они не должны перекрывать друг друга. Этот закон отражен в английском названии метода – one phase – one step. Точки равновесия при этом обязаны совпадать с направлением полюсов статора.
Минус здесь в том, что одновременно задействована лишь половина обмоток (у биполярного агрегата) или даже четверть (у униполярного).
 |
 |
Также можно выбрать принцип работы шагового мотора, при котором питание будет подаваться сразу на все витки. Он известен как способ two-phase-on (full step), и при нем ротор остается в состоянии равновесия между силовыми линиями неподвижной части вала, причем смещенным на половину дискретного движения. Благодаря такому решению крутящий момент может быть повышен до 35-40%.
Полушаговый режим
На каждом втором перемещении задействована одна фаза, в то время как между ними – пара. Это дает возможность вдвое уменьшить величину угла и, следовательно, в 2 раза повысить количество переходов в течение оборота. Удобен именно тем, что сравнительно просто обеспечивает результат, поэтому достаточно распространен.
При таком устройстве и работе шагового электродвигателя важно помнить, что его остановка должна производиться с формированием тока удержания – небольшого, намного меньше номинального, но все равно необходимого и важного. Он нужен, чтобы автоматически фиксировать положение ротора после полного отключения напряжения. Иначе подвижный вал будет в свободном состоянии и при механическом воздействии (которое весьма вероятно) сместится, чего нельзя допустить. Зато при его подаче отпадает потребность в организации тормозной системы, добавлении механического фиксатора или другого элемента, способного стать «слабым звеном», то есть снизить общую надежность силового агрегата.
Микрошаговый режим
Рассмотрим, как в этом случае действует пошаговый двигатель: принцип работы сводится ко включению двух фаз с неравномерным распределением тока обмоток. Благодаря этому смещается магнитное поле статора, а вслед за ним и позиция ротора. Диспропорция между переключениями отличается маленькой дискретностью.
За счет такого подхода осуществляются крайне малые шаги – в 1/3 от полного или еще короче, числом до 1000 за оборот. Это позволяет максимизировать точность установки инструментов, хотя и значительно усложняет систему контроля. На практике данное решение востребовано в особо сложных и ответственных случаях, при создании и использовании сравнительно дорогих, но прецизионных станков.
Достоинства и недостатки
Мы уже рассмотрели, как устроен, работает, и где применяется шаговый двигатель, что это такое, но наше описание было бы неполным без анализа плюсов и минусов его стандартных моделей.
В списке объективных преимуществ:
- Поддержка полного крутящего момента при постепенном уменьшении скорости хода, даже перед остановкой.
- Точное позиционирование в рамках выбранного режима, причем без какой-либо обратной связи; количество дискретных перемещений задается углом поворота.
- Положение силового агрегата фиксируется сразу же в момент прекращения движения – ток удержания обеспечивает отсутствие инерционных сдвигов.
- Быстрый старт и реверс, оперативное переключение.
- Регулировать вращение можно прецизионно, возвратного влияния при этом, опять же, не наблюдается.
- Высокий уровень общей надежности, отчасти объясняется тем, что нет коллекторных щеток и других элементов, которые могли бы стать «слабым звеном».
В числе практических недостатков:
- Принцип действия шагового двигателя может сопровождаться чересчур сложным управлением.
- Скорость не очень-то высока номинально.
- Иногда возникает резонанс, что чревато сбоями в установке инструментов.
- Удельная мощность сравнительно мала.
- Под воздействием механических перегрузок возможна потеря позиционирования.
Очевидно, что плюсы значительнее минусов, к тому же, есть области, в которых без рассматриваемых силовых агрегатов просто не обойтись, когда они в разы превосходят коллекторные. Это те случаи точной механики, в которых нужно перемещать узлы с мгновенными остановками и быстрым изменением вектора движения.
Важные характеристики
- С точки зрения электротехники, пошаговый привод – это достаточно сложное устройство, обладающее целым рядом параметров. Вот основные из них:
- Число полных шагов в течение одного цикла – от него зависит точность, плавность хода, разрешающая способность; у современных моделей должно быть на уровне 200-400.
- Угол дискретного перемещения (поворота вала) – рассчитывается как 360 0/количество отдельных передвижений за оборот; аналогичный предыдущему показатель, просто представленный в другом виде; его актуальные значения – 1,8-0,9 градусов.
- Пробивное напряжение – максимальное, по достижении которого нарушается изоляция, определяет безопасность использования.
- Допустимое постоянное напряжение – измеряется в статическом режиме на витках; в ряде случаев не приводится, но и тогда его можно рассчитать по закону Ома.
- Номинальный ток – наибольший из возможных для безопасного и бесперебойного функционирования силового агрегата.
- Сопротивление обмотки – оно, вместе с предыдущей характеристикой, говорит о том, какое количество Вольт можно подавать на пошаговые электродвигатели.
- Индуктивность фазы – определяет скорость нарастания тока; приобретает особенно важную роль при быстром вращении вала.
- Сопротивление изоляции – между обмотками и корпусом.
Отдельным семейством параметров являются моменты:
- крутящий – зависит от частоты вращения; указывается максимальный для данного силового агрегата;
- инерции – чем он меньше, тем быстрее разгон;
- стопорный – нужен для прокручивания вала в случае отсутствия питания;
- удерживающий – активен при полной остановке и запитывании номинальным током двух фаз.
Подключение
Есть модели с 4, 5, 6, 8 соединителями; «четверка» подходит только для биполярных, так как у них пара фазных обмоток с двумя коннекторами и нужно устанавливать непрерывные связи. «Шестерка» обладает еще и центр-кранами на каждом витке и поэтому универсально применима ко всем силовым агрегатам.
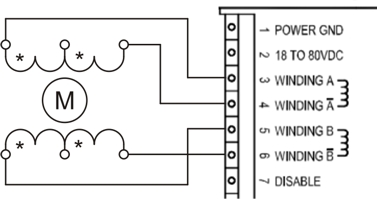
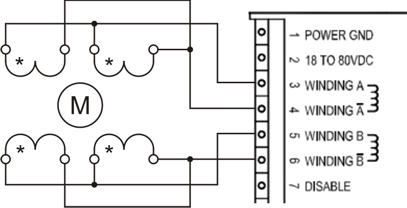
Типичные варианты коммутации выглядят следующим образом:
 |
 |
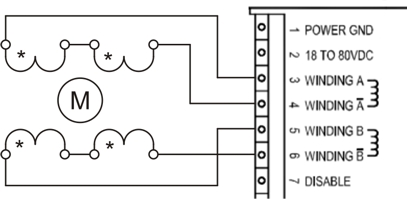 |
Для беспроблемной эксплуатации важно помнить правила подачи номинального напряжения, а также изменения скорости крутящего момента и понижения линейного.
Виды управления
Помимо уже рассмотренных режимов – полно-, полу- и микро-, – есть и другие, определяющие, как сигналы подаются на полюса и, соответственно, как работает шаговый мотор. Рассмотрим два принципиально разных их типа.
Без контроллера
Реализуется благодаря Н-мосту (часто именно так и называется), позволяющему практически мгновенно переключать полярность и обеспечивать быстрый реверс. Система выстраивается на транзисторах и/или микросхемах: выбранные ЭРЭ гарантируют логическую цепочку, по которой перемещаются ключи. Подходит для бесколлекторных моделей.
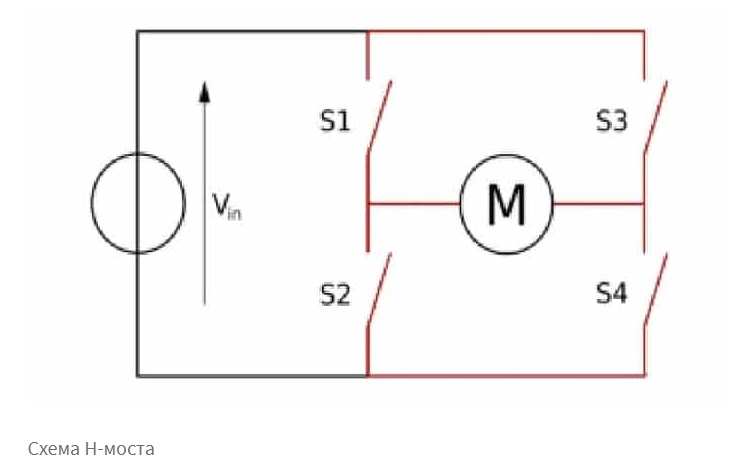
Согласно данной схеме, напряжение идет от источника питания к мосту. Контакты включаются попарно (S1-S4 и S3-S2), благодаря чему ток проходит через обмотки, запуская вращение в нужную сторону.
С контроллером
Взглянем на него подробнее, ведь он определяет, как работает и что такое шаговый электродвигатель: это электронный блок, который формирует последовательность сигналов и посылает их на катушки статора. Чтобы он не вышел из строя при возникновении аварийной ситуации (например, при коротком замыкании), выводы привода снабжают диодами, не пропускающими обратные импульсы. Дает возможность реализовать самые разные режимы.
Популярные схемы управления
Предлагаем вашему вниманию два интересных варианта:
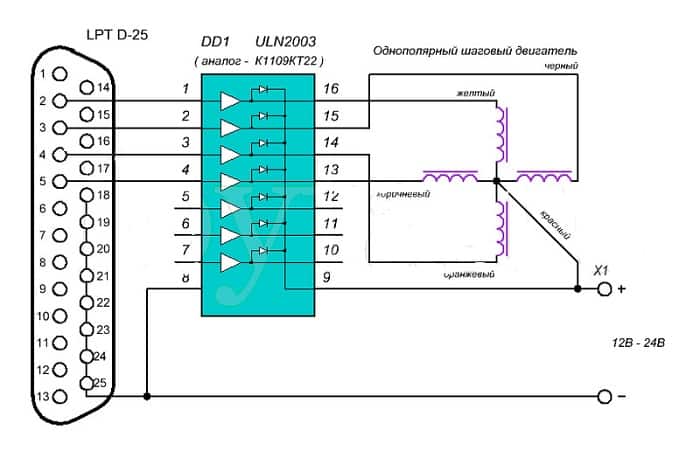
Ключевое преимущество здесь – помехозащищенность. Как прямой, так и инверсный сигнал подключаются к своим полюсам напрямую. При ее воплощении в жизнь необходимо озаботиться экранированием сигнального соединителя. Подходит, когда планируете с низкой мощностью использовать шаговый электродвигатель: принципы работы будут выполняться даже при условии высоких нагрузок.
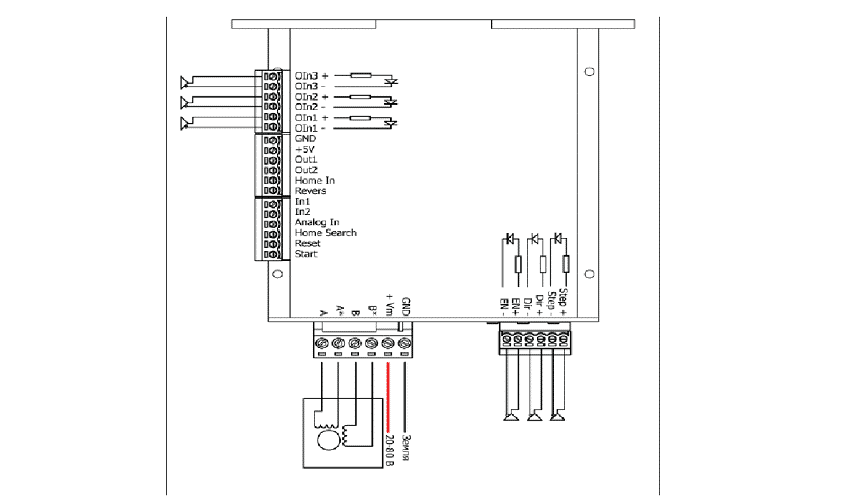
Еще одно достойное решение:
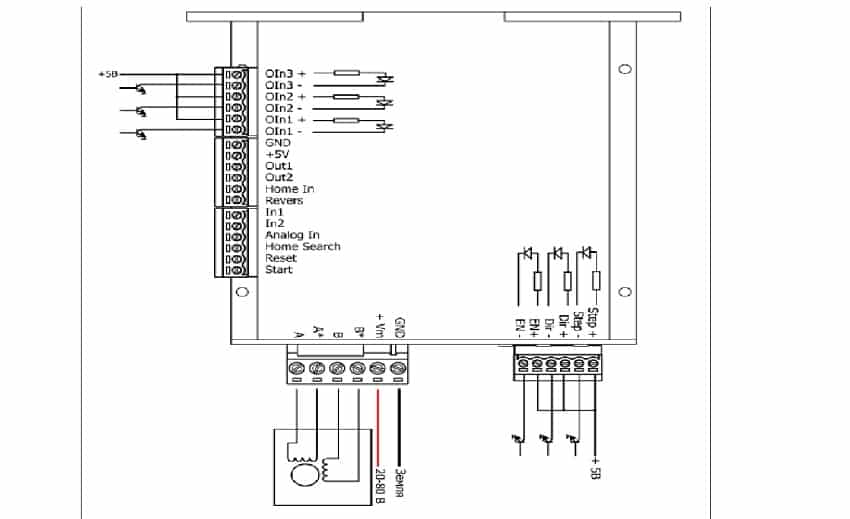
Ключевая особенность – объединение вводов, подключаемых к положительному полюсу. Если при этом будет подаваться питание, превышающее 9 В, понадобится дополнить схему резистором-ограничителем тока. В общем же она очень удобна тем, что обеспечивает возможность строго и точно задавать скорость и количество перемещений в течение оборота.

Если на один его D-вывод подавать логическую 1, а на остальных оставлять 0, транзистор откроется, что обеспечит прохождение сигнала к катушке. Вот таким нехитрым способом осуществляется дискретное передвижение.
Советуем на практике посмотреть, что собой представляет шаговый двигатель, назначение устройства и принцип действия – попробуйте самостоятельно задать ему некоторые команды. Взяв последнюю разработку за основу, не проблема выполнить печатную плату, под заказ или даже своими силами, впаяв в нее необходимые ЭРЭ (почти все диоды, транзисторы, резисторы можно извлечь из отслужившей свое техники). Управление возможно осуществлять с обычного компьютера.
Полезные ролики по теме
Если на эксперименты нет времени или желания, и срочно нужен станок с надежным силовым агрегатом, вам есть из чего выбрать. Достойных производителей сегодня хватает, например, современное оборудование предлагает ижевский завод «Сармат», все модели которого отличаются эргономикой, эффективностью, высокой степенью безопасности.
Ну а напоследок посмотрите, как работает шаговый двигатель, видео помогут вам окончательно понять принцип действия данных приводов.
Изучаем миниатюрный шаговый двигатель
Шаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.

Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов.
Результатами своих поисков и экспериментами я поделюсь в этой статье.
Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
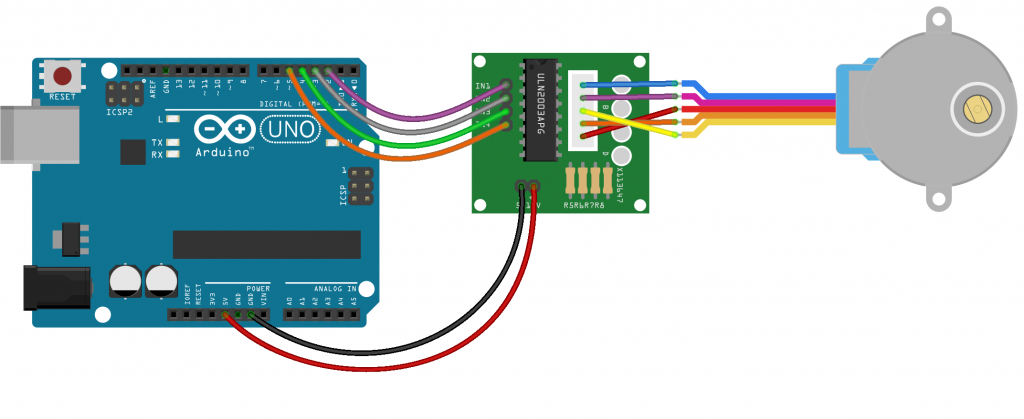
- драйвер L293D + микроконтроллер ATtiny44;
- драйвер TMC2208 + микроконтроллер ATtiny44;
- микроконтроллер ATtiny44 (без драйвера).
Собственно вопросы тут может вызвать только последний пункт. Поверьте, я тоже был удивлён, когда наткнулся на ролик (вот он), где парень просто берёт и напрямую цепляет шаговый мотор к пинам микроконтроллера! Но давайте обо всём по порядку.
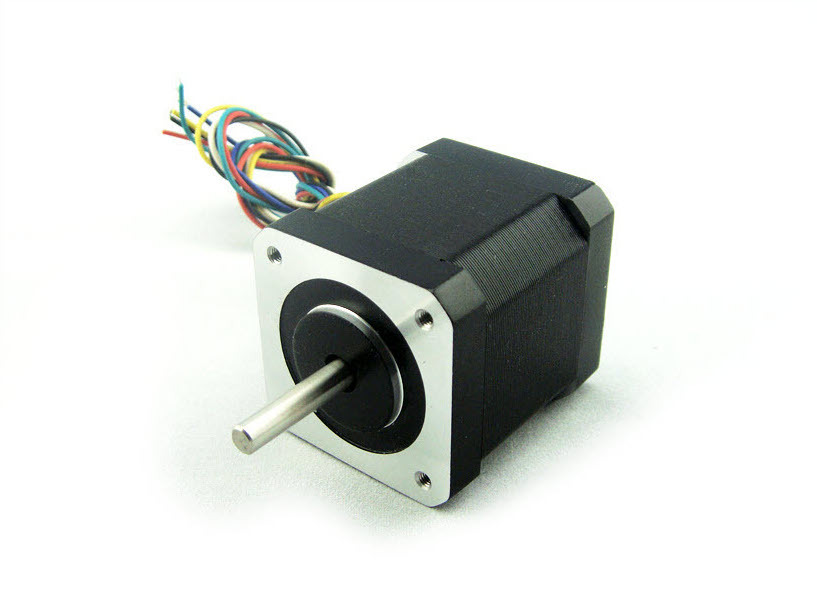
Знакомство
Сначала немного посмотрим на внешний вид нашего героя:

Он действительно очень маленький! Согласно умной книжке Петренко С.Ф.
«Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
Посмотрим как он устроен:

Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать.
Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
В описании сказано, что напряжение питания 5В. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки.
Пробуем подключить.
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга. Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост. Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше.
Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.

Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал.
Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан).
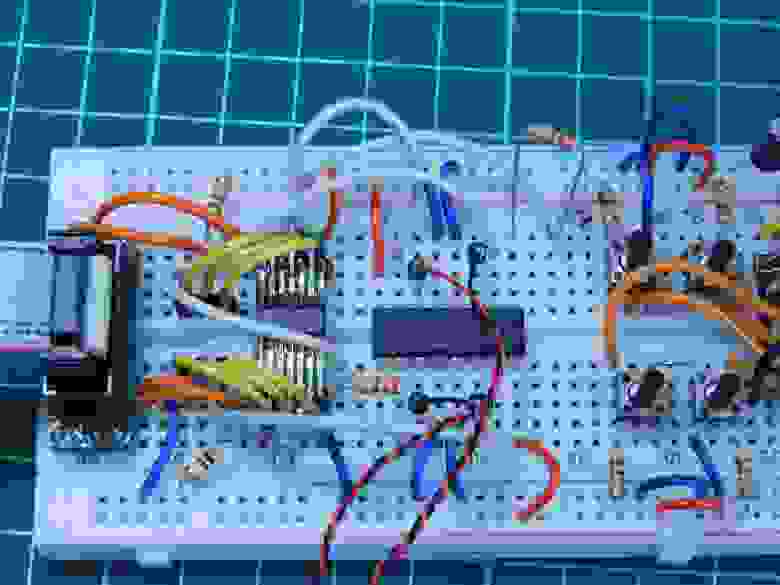
Вот как выглядит собранная схема на макетной плате:
И вот так расположен наш подопытный:

Теперь можно приступать к экспериментам.
Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В:
I=U/R = 5В/26Ом = 190мА
Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться.
Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны. И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
- Полношаговый однофазный это когда одновременно напряжение подаётся только на одну фазу двигателя, ротор делает шаг, затем текущая фаза выключается и включается следующая.
- Полношаговый двухфазный это когда напряжение подаётся одновременно на две фазы мотора, при этом, ротор притягивается одновременно к двум обмоткам, что создаёт больший крутящий момент.
- Микрошаговый режим в этом случае реализуется тот же принцип, что и на полношаговом двухфазном, то есть работают одновременно две обмотки, но напряжение (и как следствие ток) распределяется между ними неравномерно. Фактически, это означает, что мы можем поставить моторчик в неограниченное количество положений (на практике, разумеется, такого сделать нельзя). Увеличивается точность позиционирования.
Попробуем реализовать первые два режима на микросхеме L293D а для микрошагового режима оставим специальный драйвер из второго эксперимента.
Исходный код программы выглядит следующим образом:
Полношаговый режим. Одна фаза
Двигатель делает 16 шагов на один оборот. Причём шаги для двух фаз имеют не одинаковую угловую величину. Не знаю с чем это связано. Может конструкция двигателя такая?
Посмотрим на максимальную частоту шагов, которую он может обеспечить в таком режиме, не пропуская их.
Минимальная задержка между шагами 2мс, значит 500 шагов/секунду. Неплохо, это 31 об/сек = 1850 об/мин.
Полношаговый режим. Две фазы
Обратите внимание, что в этом случае шаги получаются ровнее, они одинаковы по величине (во всяком случае, более одинаковы, чем в предыдущем случае).
Естественно, в этом случае под напряжением находятся одновременно две обмотки и теплоотдача возрастает. Двигатель уже через несколько секунд нагревается достаточно сильно, потому эксперимент я прекратил.
Что с максимальной частотой шагов? 500 шагов/секунду; 31 об/сек = 1875 об/мин.
Надо сказать, что для шагового двигателя он довольно шустрый. Это связано с малым количеством магнитных полюсов на роторе.
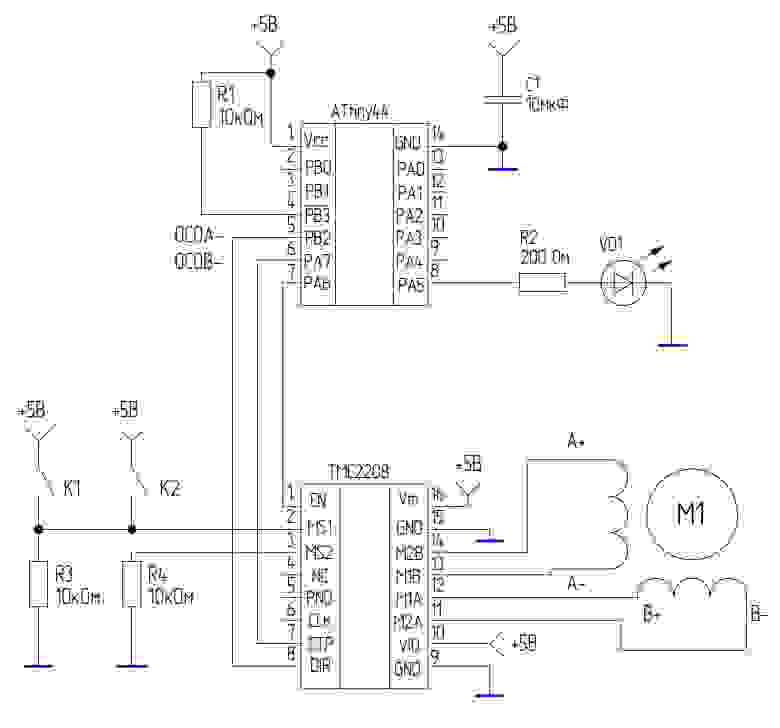
Эксперимент №2. TMC2208 + ATtiny44
TMC2208 — название микросхемы-драйвера для управления биполярными шаговыми двигателями, аналогично называется модуль на её основе, который выпускается для установки в самодельные (и не только) 3D принтеры и имеет унифицированное расположение выводов.
Много и доходчиво сказано про этот модуль вот здесь.
В интернете много написано про то, как установить его в свой 3D принтер, но нас интересует как подключить модуль к микроконтроллеру, потому давайте разбираться.
Характеристики микросхемы впечатляют (только впечатлительных людей):
- напряжение питания логической части: 3-5В;
- напряжение питания двигателя 5.5-36В;
- пиковый ток 2А;
- настройка максимального тока двигателя;
- поддержка интерфейса UART как для управления, так и для конфигурирования внутренних регистров;
- автоматическое отключение питания;
- поддержка микрошагового режима управления двигателем вплоть до 1/16 шага.
Управлять ей очень просто, по сути нужно всего два пина микроконтроллера. Один подключаем к DIR — указываем направление вращения двигателя, другой подключаем к STEP — при подаче импульса микросхема производит необходимые манипуляции с токами и напряжениями на обмотках двигателя и тот делает один шаг.
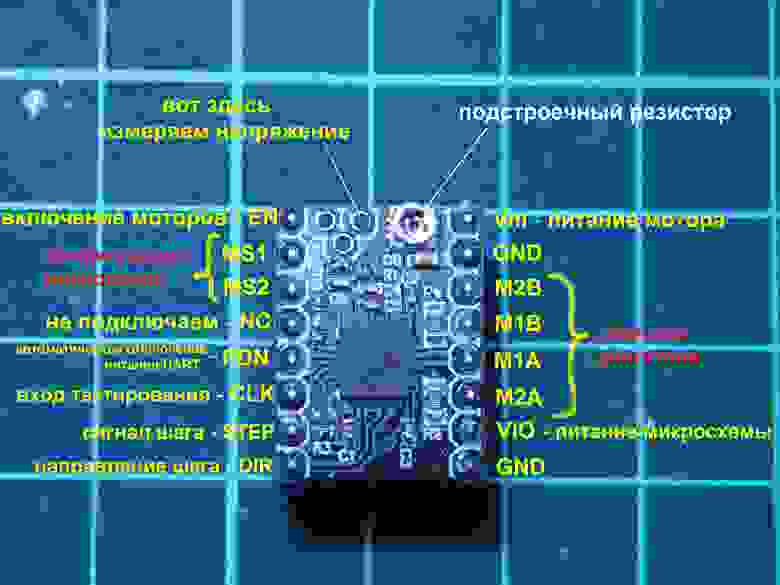
Схема подключения будет выглядеть так:
Дополнительно я использовал пин EN, чтобы отключать моторчик и длительное время не держать обмотки под напряжением.
Перед тем как всё запустить нужно произвести предварительную настройку модуля. Во-первых, выставить желаемый режим микрошага. Во-вторых, выставить желаемый максимальный ток двигателя.
С микрошагом всё просто. За это отвечают пины MS1 и MS2.

Отмечу, что микросхема не скачкообразно меняет напряжение, а делает это «плавно», но так как микросхема цифровая, то на выходе у нас не гладкий сигнал, а сигнал с маленьким шагом, если верить документации, то каждый шаг она разбивает на 256 микрошагов. Сделано это для увеличения плавности хода, снижения шумов от двигателя и по идее не должно позволять конструкции, к которой он прикручен, входить в резонанс. Короче, всё для того, чтобы 3D принтер работал тише.
Чтобы выставить ток двигателя необходимо измерить напряжения на контакте Vref, который указан на рисунке. Изменить значение напряжения можно при помощи потенциометра, установленного рядом с контактом. Напряжение на контакте будет пропорционально току двигателя, и зависимость будет иметь следующий вид:
Нашему моторчику нужно примерно 150мА, потому Vref = 0,216В. Устанавливаем…
Подразумевается, что увеличение тока микросхема обеспечивает за счёт увеличения напряжения на обмотке. Потому, нужно позаботиться о том, чтобы этого напряжения хватило. Но, полагаю, для того маленького моторчика должно хватить и 5В.
Протестируем работу моторчика с различными режимами микрошага и посмотрим что получится (пауза между микрошагами 10мс):
Можно заметить, что движения моторчика стали более плавными (по сравнению с предыдущим экспериментом), однако характерные 16 шагов всё равно наблюдаются довольно чётко. Что же… видимо это черта шаговых двигателей с ротором из постоянных магнитов.
Ещё необходимо отметить, что моторчик в этом режиме нагревается почти также сильно, как в полношаговом режиме с двумя фазами. Оно и понятно, обмотки постоянно находятся под напряжением, непрерывно происходит выделение тепла.
Полагаю, для таких моторчиков использование такого драйвера, да и вообще режимов микрошага не очень целесообразно.
Эксперимент №3. ATtiny44-драйвер
Вернёмся ненадолго к первому эксперименту и вспомним, что входы EN1 и EN2 микросхемы драйвера подключены к пинам OC0A и OC0B микроконтроллера. Это значит, что мы можем подать туда ШИМ сигнал, генерируемый при помощи таймера TIMER0 и таким образом изменять напряжение, прикладываемое к обмоткам двигателя и соответственно регулировать ток, который будет протекать через них.
Согласно даташиту на микроконтроллер ATtiny44 максимальный ток, который может выдать один пин составляет всего 40мА. Причём не указано для какого вида тока (пульсирующего или постоянного) эта характеристика. Просто она есть и она вот такая…
Надо сказать, что я более 7 лет знаком с микроконтроллерами фирмы ATMEL. И ни разу у меня не возникло желания проверить эту строчку из даташита.
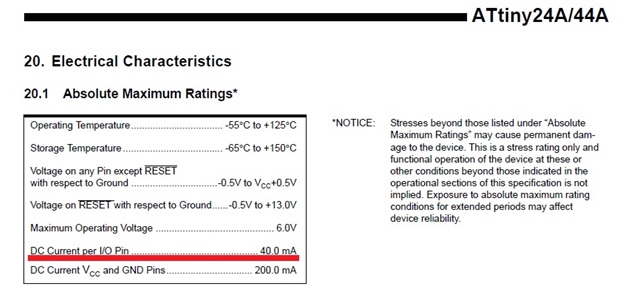
Возможно, производитель просто подстраховывается и на самом деле он может выдать больше, а может это действительно максимум, что может выдать один пин.
Мы это выясним. Но сначала нужно выяснить при каком минимальном токе моторчик вообще способен вращаться.
Используя схему из первого эксперимента, подгоняем значение тока через обмотки равное 40мА. Запускаем в полношаговом режиме с двумя фазами (так как будет выше крутящий момент):
Отлично! При 40мА двигатель успешно запустился! Был также выявлено минимальное значение тока обмоток, необходимое для устойчивой работы мотора, и равно оно 30мА.
Разумеется, крутящий момент будет значительно ниже, но для нас важен сам факт того, что удалось запустить моторчик с таким маленьким энергопотреблением.
Схема подключения шагового двигателя к микроконтроллеру будет следующей:

Поскольку каждый пин микроконтроллера работает как полумост (может коммутировать вывод микросхемы либо на Vcc, либо на GND), то для управления биполярным шаговым мотором нам понадобиться 4 пина микроконтроллера.
Немного поясню как работает эта программа. Это модифицированный код из первого эксперимента. Как я говорил выше, будет использован 8 битный TIMER0 для генерирования ШИМ сигнала на выходах OC0A и OC0B. Таймер настраивается в режим FastPWM с предделителем на 8 (частота сигнала при 8МГц тактового генератора микроконтроллера составляет 3906Гц).
Чтобы изменять полярности сигналов на обмотках происходит переключение пина микроконтроллера от Vcc к GND изменением соответствующего бита в регистре PORTx и изменением коэффициента заполнения ШИМ путём записи значений в регистры OCR0A и OCR0B (значения подбирались экспериментально).
Курс схемотехники, прослушанный на первом курсе института подсказывает, что мультиметр показывает среднеквадратическое значение напряжения и тока в двигателе.
Шаговый двигатель вращается от пинов микроконтроллера без драйверов!
Но здесь мы не выходим за пределы возможностей микроконтроллера, по крайней мере, если верить тому, что пишут в документации. В таком режиме микроконтроллер и моторчик могут работать долго. Действительно, эксперимент длился 20 минут. За это время не наблюдалось ни пропуска шагов, ни сброса контроллера, ни перегрева (ни у двигателя, ни у контроллера).
Отбросим все предосторожности
Уберём из эксперимента ШИМ и будем напрямую управлять пинами микроконтроллера при помощи регистров PORTx. Посмотрим что будет с микроконтроллером после этого.
Работает… с максимальным током в 51мА… Что же… неожиданно, похоже это и есть предельный ток, который может отдать один пин микроконтроллера? Если я ошибаюсь, поправьте меня.
В любом случае, ролик с ютуба не обманул. Действительно можно управлять этим моторчиком без всяких драйверов.
Выводы
Мы подробно изучили миниатюрные биполярные шаговые моторчики, их конструкцию и способы управления ими, для использования в собственных приложениях.
1. Миниатюрный биполярный шаговый мотор с ротором из постоянных магнитов действительно миниатюрный.
Его основные особенности:
- малое количество магнитных полюсов, как следствие, малое количество шагов (у моего, напомню, всего 16);
- относительно большая скорость вращения (следствие из предыдущего пункта), в эксперименте удалось достичь 1875 об/мин;
- неудовлетворительно работает в микрошаговых режимах (не удерживается промежуточное положение ротора);
2. Миниатюрный шаговый двигатель может управляться любыми драйверами, подходящими для работы с биполярными шаговыми моторами, необходимо только подобрать параметры тока обмоток.
3. Использование специализированного драйвера TMC2208 является спорным вопросом, так как микрошаговый режим не поддерживается самим двигателем, хотя переходы между шагами выполняются более плавно.
4. Возможно подключение шагового двигателя непосредственно к портам микроконтроллера. Но это только в рамках эксперимента, так как крутящий момент в данном случае совсем незначителен, да и малый ток не позволяет совершать шаги с большой скоростью.
В следующий раз расскажу, для чего именно нам потребовались такие маленькие шаговые моторчики.
Шаговые двигатели. Принцип работы и управление
ШАГОВЫЕ ДВИГАТЕЛИ: ПРИНЦИП РАБОТЫ И ОТЛИЧИЯ ОТ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока (ДПТ) с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система «мотор — контроллер» разрабатывается так, чтобы была возможность вывода ротора в любую фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели используются преимущественно в системах без обратных связей, требующих небольших ускорений при движении. Синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
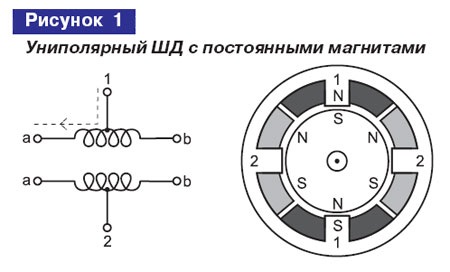
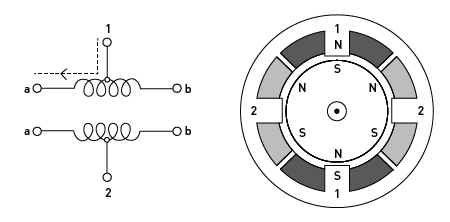
Шаговые двигатели(ШД) делятся на две разновидности: с постоянными магнитами и с переменным магнитным сопротивлением (гибридные). Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
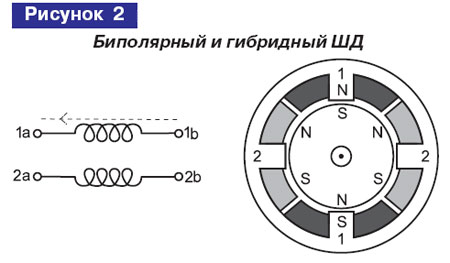
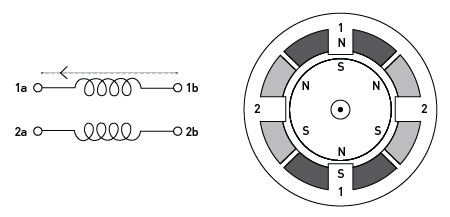
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные, обмотки в них не имеют центрального отвода (см. рис. 2).
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи широтно-импульсной модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, остановки, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных устройств.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Она позволяет независимо менять полярность напряжения на каждой обмотке.
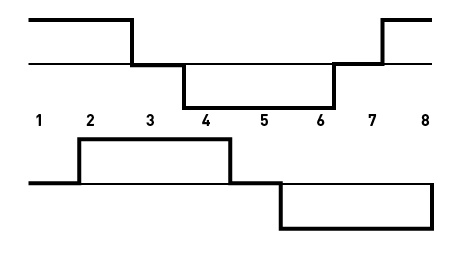
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для режима с половинным шагом.
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
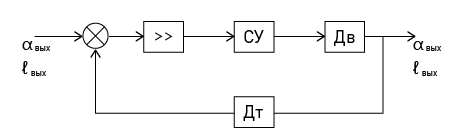
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
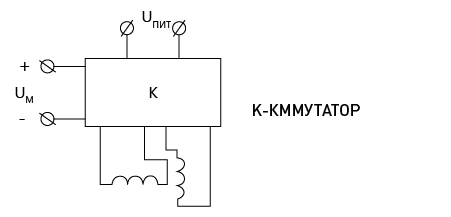
Мощность шаговых двигателей лежит в диапазоне от нескольких ватт до одного киловатта. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ АКТИВНОГО ТИПА
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.
Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
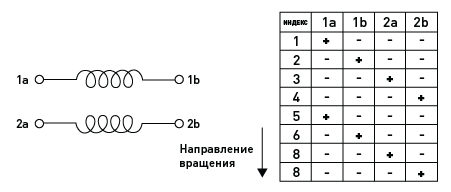
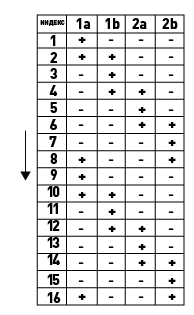
Различают два вида коммутации обмотки шагового двигателя: симметричную и несимметричную.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
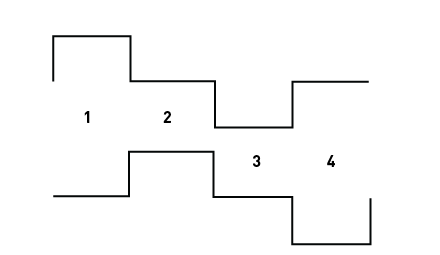
Число тактов Kt системы управления называют количеством состояний коммутатора за период его работы t. Как видно из рисунков, для симметричной системы управления Kt = 4, а для несимметричной Kt = 8.
В общем случае число тактов Kt зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
где: n1 = 1 — при симметричной системе коммутации;
n1 = 2 — при несимметричной системе коммутации;
n2 = 1 — при однополярной коммутации;
n2 = 2 — при двуполярной коммутации.
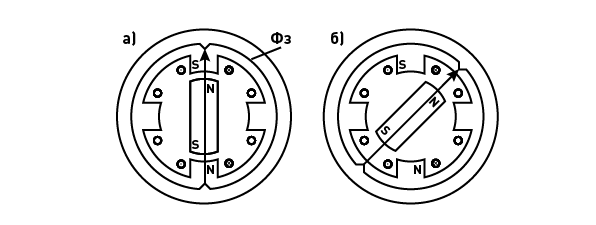
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обоих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р = 1). Реальные шаговые микродвигатели являются многополюсными (р > 1). Для примера приведем двухполюсный трехфазный шаговый двигатель.
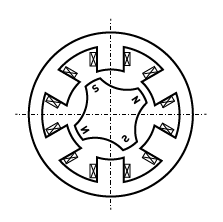
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния, поэтому р = 4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
РЕАКТИВНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
У активных шаговых двигателей есть один существенный недостаток: у них — крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определяется выражением:
αш = 360 / Kt * Zр
В выражении для KT величину n2 следует брать равной 1, так как изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышения степени редукции шаговых двигателей как активного, так и реактивного типа, можно достичь применением двух-, трех- и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов — два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время, роторы-звездочки каждого из пакетов не имеют пространственного сдвига, то есть оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной. Кроме того, она требует сложного коммутатора.
Индукторные (гибридные шаговые двигатели)
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага — больший синхронизирующий момент, лучшие энергетические и динамические характеристики.
ЛИНЕЙНЫЕ ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ
При автоматизации производственных процессов часто бывает необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т. д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
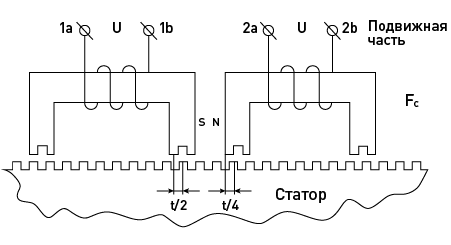
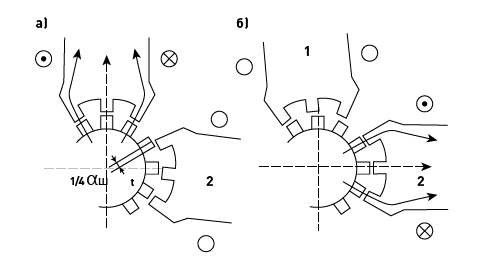
Зубцовые деления статора и подвижной части двигателя равны. В пределах одного магнитопровода ротора они сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно соответствующих параметров первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница — лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, то есть на четверть зубцового деления t/4.
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнитовоздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под него нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между ними создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечиваются минимальное сопротивление движению ротора и высокая точность позиционирования.
РЕЖИМЫ РАБОТЫ
СИНХРОННОГО ШАГОВОГО ДВИГАТЕЛЯ
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
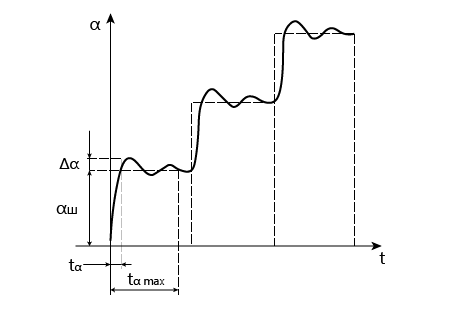
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при которой шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потоком статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
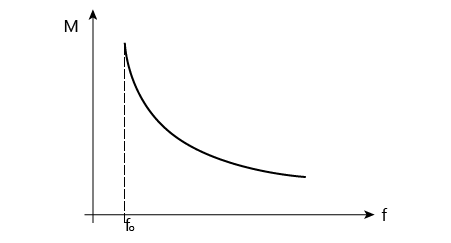
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
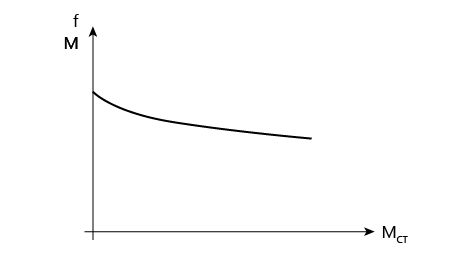
Приемистость падает с увеличением нагрузки.
ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
Блог технической поддержки моих разработок
Шаговые двигатели, принцип действия, разновидности, характеристики

Во многих своих разработках я применяю шаговые двигатели. Есть области точной механики в которых они просто незаменимы. Я постараюсь как можно проще объяснить, как работает шаговый двигатель, что он из себя представляет.
Шаговый двигатель это бесколлекторный синхронный двигатель, ротор которого совершает дискретные перемещения (шаги) определенной величины с фиксацией положения ротора в конце каждого шага.
Т.е. перемещение ротора происходит шагами известной величины. Подсчитав шаги можно определить, на сколько изменилось положение ротора, вычислить его абсолютную позицию.
Объединяя в себе двигатель и позиционирующее устройство без обратной связи, шаговый двигатель является идеальным приводом в промышленном оборудовании, станках с ЧПУ, робототехнике…
Принцип действия шаговых двигателей
Представьте себе двухполюсный постоянный магнит на валу двигателя – это ротор, окруженный замкнутым магнитопроводом с четырьмя обмотками – статор. Вернее это две обмотки AB и CD с половинками, расположенными на противоположных полюсах статора.

Подключили к источнику напряжения обмотку AB (полярность + -) как показано на рисунке. Ток в этой обмотке вызовет появление магнитного поля статора с полюсами сверху N, снизу S.
Как известно разноименные полюса магнитов притягиваются.
В результате ротор (постоянный магнит) займет положение, в котором оси магнитных полей ротора и работающих полюсов статора совпадают. Механическое положение будет устойчивым. При попытке сдвинуть ротор, возникнет сила, возвращающая его назад.

Теперь снимем напряжение с обмотки AB и подадим на обмотку CD (полярностью + -). Ток в обмотке CD вызовет магнитное поле с горизонтальными полюсами, слева S, справа N.
Магнитное поле делает все, чтобы магнитный поток замкнулся по минимальному пути. Ротор повернется в положение указанное на рисунке. Механическое положение ротора опять устойчивое. Это был первый шаг двигателя. В нашем случае он равен одной четвертой оборота.

Отключаем обмотку CD и подаем напряжение опять на обмотку AB, но уже в другой полярности (- +). Опять магнитное поле статора повернется на 90°, а за ним и ротор.

Еще одна коммутация AB – отключаем, CD – подключаем (полярность – +) и ротор совершает еще один шаг на одну четвертую окружности.
Следующая коммутация (с которой мы начали) вернет ротор в исходное положение. Мы сделали полный поворот за 4 шага.
Если продолжить переключение фаз, ротор будет вращаться с частотой, пропорциональной частоте переключения фазных обмоток.
Если коммутировать фазы в противоположной последовательности – крутиться в обратном направлении, прекратить коммутацию – остановится.
Биполярные и униполярные шаговые двигатели
Это был биполярный шаговый двигатель.

Биполярный двигатель имеет по одной обмотке для каждой фазы. На предыдущих рисунках это обмотки AB и CD. Для изменения магнитного поля должна обеспечиваться сложная коммутация обмоток. Каждая обмотка:
- отключается от источника напряжения,
- подключается в прямой полярности
- подключается с противоположной полярностью.

Для такой коммутации требуется сложный мостовой драйвер. Примером такого устройства является микросхема L298N. Микросхема обеспечивает ток коммутации до 2 А. Если нужны большие токи, то задача управления биполярным двигателем еще усложняется.
Существует другой способ изменения магнитного поля в статоре с гораздо более простой схемой коммутации. Это применение двигателя с униполярными обмотками.
Схема двух фазного шагового двигателя с униполярными обмотками и последовательность коммутаций обмоток выглядит так.
У всех четырех обмоток один вывод подключен к плюсовому выводу источника питания. А другие выводы A,B,C,D последовательно коммутируются к минусовому сигналу. Соответствующие обмотки создают магнитное поле, и ротор поворачивается вслед за ним.



Для коммутации обмоток таким способом достаточно четырех ключей, замыкающих обмотки на землю. Ключи часто управляются непосредственно с выводов микроконтроллеров.
Иногда средние выводы обмоток конструктивно объединены внутри двигателя, иногда выводятся все выводы отдельно. Кстати, это не повод называть двигатель четырехфазным. Все равно он будет двухфазным.

Биполярный двигатель обеспечивает, при тех же размерах, больший крутящий момент, по сравнению с униполярным. Оно и понятно. Одновременно в униполярном двигателе работает только одна обмотка, вместо двух. Выигрыш в моменте у биполярного составляет около 40%.
Зато, если нет необходимости использовать двигатель на полную мощность, униполярным двигателем гораздо проще управлять.
Разновидности шаговых двигателей
Основные виды шаговых двигателей:
- с переменным магнитным сопротивлением
- с постоянными магнитами
- гибридные.
Шаговые двигатели с переменным магнитным сопротивлением
У двигателей с переменным магнитным сопротивлением в роторе нет постоянных магнитов. Их ротор выполнен из магнитомягкого материала и имеет зубчатую форму. Магнитный поток замыкается через ближайшие к полюсам статора зубцы. Зубцы притягиваются к полюсам. Этим и обеспечивается вращение.
При тех же размерах, двигатели с переменным магнитным сопротивлением имеют меньший крутящий момент, чем другие типы шаговых двигателей.
Применяются они довольно редко. Я знаю только одну фирму, которая использовала такие двигатели. Я разрабатывал управление для них. Выбор двигателей именно с переменным магнитным сопротивлением был обусловлен тем, что фирма сама изготавливала все детали двигателя. А сделать ротор для привода такого вида намного проще, потому что в нем не используются постоянные магниты.
Двигатели с постоянными магнитами
У шаговых двигателей этого вида ротор содержит постоянные магниты. Общий принцип действия шагового двигателя я объяснял на двигателе с постоянным магнитом. Только в реальных двигателях магнитов больше. Вот пример двигателя с тремя парами полюсов ротора.

У реальных двигателей с постоянными магнитами число шагов на оборот доходит до 48, что соответствует углу шага 7,5 °.
Гибридные двигатели
Гибридные двигатели обеспечивают меньшую величину шага, больший момент и скорость. Число шагов на оборот для такого типа двигателей доходит до 400 (угол шага 0,9°).
При этом они более сложные в изготовлении и более дорогие. Я не хочу забивать читателю голову конструкцией этих двигателей. У них есть и зубчатый ротор, и постоянные магниты. По принципу действия гибридные двигатели эквивалентны двигателям с постоянными магнитами, но с гораздо большим числом полюсов.
Это самый распространенный тип шаговых двигателей.
Управление шаговым двигателем
Существуют три режима управления шаговым двигателем:
- полношаговый
- полушаговый
- микрошаговый.
Первый способ был описан в примерах выше. Это попеременная коммутация фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза.
Способ называется на английском one phase on full step – одна фаза на полный шаг. Точки равновесия ротора совпадают с полюсами статора.

Недостатком этого режима является то, что в один и тот же момент используется половина обмоток для биполярного двигателя, и только четверть для униполярного.
Есть вариант полношагового режима управления при котором в одно и то же время включены две фазы. Называется two-phase-on full step – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки..

Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага.
Полушаговый режим.
Этот способ позволяет от двигателя получить в два раза больше шагов на оборот ротора. Каждый второй шаг включается одна фаза, а между ними – включаются сразу две.

В результате такой коммутации угловое перемещение шага уменьшается в два раза, или в два раза увеличивается число шагов. Полный момент получить в полушаговом режиме не удается. Не смотря на это, полушаговый режим используется часто. Уж очень простыми методами он удваивает число шагов двигателя.
Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий. Чтобы зафиксировать положение ротора, необходимо формировать в обмотках двигателя ток удержания. Этот ток может быть значительно меньше номинального.
Способность шагового двигателя фиксировать свое положение при остановке позволяет обходиться без механических фиксаторов, тормозных систем и т.п.
Микрошаговый режим.
Для получения еще большего числа шагов двигателя применяют микрошаговый режим. Включают две фазы, как на полушаговом режиме, но токи обмоток распределяют не равномерно. Магнитное поле статора смещается между полюсов, смещается и положение ротора. Как правило, диспропорция токов между рабочими фазами происходит с определенной дискретностью, микрошагом. Бывают микрошаги с величиной треть от полного шага. Бывают значительно больше. Я разрабатывал систему управления индукторным приводом, так там было больше 1000 микрошагов.
Микрошаговый режим способен значительно повысить точность позиционирования шагового двигателя. Хотя система управления приводом становится намного сложнее.
Недостатки и достоинства шаговых двигателей .
Преимущества шаговых двигателей.
- Точное позиционирование без обратной связи. Число импульсов определяет угол поворота.
- Двигатель обеспечивает полный крутящий момент при снижении скорости вращения, вплоть до остановки.
- Двигатель фиксирует свое положение при остановке за счет тока удержания.
- Регулировка скорости вращения с высокой точностью без обратной связи.
- Способность быстрого старта, остановки, реверса.
- Высокая надежность. Отсутствие коллекторных щеток.
Недостатки шаговых двигателей.
- Сложная система управления.
- Невысокие скорости вращения.
- Возможно явление резонанса.
- Может произойти потеря позиционирования при механических перегрузках.
- Низкая удельная мощность.
Как и всему на свете шаговому двигателю присущи определенные достоинства и недостатки. Но есть области в точной механике, в которых он просто незаменим. Там где надо перемещать механические узлы, мгновенно останавливать, двигать назад, регулировать скорость. Попробуйте мгновенно остановить коллекторный двигатель, и вы забудете о недостатках шагового. Попробуйте реализовать изменение скорости коллекторного двигателя в широких пределах. Проще поставить шаговый с его недостатками.
В оборудовании, которое разрабатывал я, например, станок для розлива и запайки ампул содержит 7 шаговых двигателей, станок для фасовки сыпучих препаратов – 10 двигателей. И ни один из этих двигателей я не могу заменить на коллекторный. Если интересно, посмотрите фильм, как работают шаговые двигатели в оборудовании.
Характеристики шаговых двигателей.
Шаговый двигатель с точки зрения механики и электротехники очень сложное устройство, имеющее много механических и электрических параметров. Приведу расшифровку основных технических параметров, которые используются на практике.
- Количество полных шагов за один оборот. Основной параметр двигателя, определяющий его точность, разрешающую способность, плавность движения. На двигателях серии FL57 этот параметр составляет 200 и 400 шагов на оборот.
- Угол полного шага. Представление в другом виде предыдущего параметра. Показывает на какой угол повернется вал при одном полном шаге. Может быть подсчитан как 360° / количество полных шагов за оборот. Для двигателей серии FL57 составляет 1,8 ° и 0,9°.
- Номинальный ток. Основной электрический параметр. Наибольший допустимый ток, при котором электродвигатель может работать сколь угодно длительное время. Для этого тока указаны механические параметры двигателя.
- Номинальное напряжение. Допустимое постоянное напряжение на обмотке двигателя в статическом режиме. Часто этот параметр не приводится. Вычисляется по закону Ома через номинальный ток и сопротивление обмотки.
- Сопротивление обмотки фазы. Сопротивление обмотки двигателя на постоянном токе. Параметр вместе с номинальным током, показывает какое напряжение можно подавать на обмотку двигателя.
- Индуктивность фазы. Параметр становится важным на значительных скоростях вращения. От него зависит скорость нарастания тока в обмотке. При высоких частотах переключения фаз приходится увеличивать напряжение, чтобы ток нарастал быстрее.
- Крутящий момент. Основной механический параметр. Показывает максимальный крутящий момент, который способен создать двигатель. Иногда приводится механическая характеристика в виде зависимости крутящего момента от частоты вращения.
- Момент инерции ротора. Характеризует механическую инерционность ротора двигателя. Чем этот параметр меньше, тем двигатель быстрее разгоняется.
- Удерживающий момент. Это крутящий момент при остановленном двигателе. При этом у двигателя должны быть запитаны две фазы номинальным током.
- Стопорный момент. Момент, необходимый чтобы провернуть вал двигателя при отсутствующем напряжении питания.
- Сопротивление изоляции. Как у всех электрических приборов – сопротивление между корпусом и обмотками.
- Пробивное напряжение. Минимальное напряжение, при котором происходит пробой изоляции между обмотками и корпусом. Параметр из раздела электробезопасности.
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.

- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
-
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Уплотнители для ПВХ окон

Уплотнитель для пластиковых окон Проплекс Proplex рама/створка черный
Оконный уплотнитель для притворов пластиковых окон из профил..

Уплотнитель под стеклопакет для пластиковых окон КБЕ 254 черный
Оконный уплотнитель рама/стекло пластиковых окон из профиля ..

Уплотнитель рама-створка для окон ПВХ КБЕ 229 черный
Уплотнитель для пластиковых окон из ПВХ профиля КБЕ, артикул..

Уплотнитель под стеклопакет для пластиковых окон КБЕ 255 черный
Оконный уплотнитель рама/стекло пластиковых окон из профиля ..

Уплотнитель притвора пластиковых окон Рехау черный Deventer
Оконный уплотнитель для пластиковых окон из профиля Рехау Re..

Уплотнитель для окон Саламандер Salamander рама-створка
Оконный уплотнитель для пластиковых окон из профиля Саламанд..

Уплотнитель для пластиковых окон Краус Krauss рама/створка черный
Оконный уплотнитель для притворов пластиковых окон из профил..

Уплотнитель для пластиковых окон Рехау Rehau камерный 529
В продаже появился новый уплотнитель для профиля REHAU – кам..

Уплотнитель притвора для окон ПВХ Gealan (Геалан) черный
Уплотнитель для пластиковых окон из ПВХ профиля Геалан (конц..

Уплотнитель притвора для пластиковых окон КБЕ 227 черный
Оконный уплотнитель для притворов пластиковых окон из профил..
Уплотнитель притвора для пластиковых окон Рехау, Монблан 952 черный
Оконный уплотнитель для пластиковых окон из профиля Рехау Re..

Антипылевая заглушка для паза штапика универсальная белая
Универсальная заглушка паза штапика подходит под любую ПВХ ..

Уплотнитель для окон Алюпласт Aluplast рама-створка черный
Оконный уплотнитель для пластиковых окон из профиля Алюпласт..

Уплотнитель для окон ПВХ LG 900 (ан. KBE 229) черный
Уплотнитель для пластиковых окон из ПВХ профиля LG (900) на ..

Уплотнитель для окон ПВХ Wintech (Винтек) черный
Уплотнитель для пластиковых окон из ПВХ профиля WINTECH. ..

Уплотнитель под стеклопакет для окон VEKA серый
Цена товара указана за погонный метр. Отрезаем на заказ любо..

Уплотнитель притвора для окон ПВХ Koemmerling (Кеммерлинг) черный
Уплотнитель для пластиковых окон из ПВХ профиля Кеммерлинг (..

Уплотнитель притвора для пластиковых окон Рехау, Монблан, 952 белый
Оконный уплотнитель для пластиковых окон из профиля Рехау Re..

Уплотнитель для окон ПВХ КБЕ 228 черный
Уплотнитель для пластиковых окон из ПВХ профиля КБЕ. Артикул..

Уплотнитель для окон Века Veka рама-створка черный
Оконный уплотнитель для пластиковых окон из профиля Века Vek..

Уплотнитель для окон Века Veka рама-створка серый
Оконный уплотнитель для пластиковых окон из профиля Века vek..

Уплотнитель притвора для пластиковых окон Рехау, Монблан серый
Оконный уплотнитель для пластиковых окон из профиля Рехау Re..
Уплотнитель Semperit LG 900 рама/створка
Немецкий уплотнитель для окон из непористой резины на базе к..

Уплотнитель для пластиковых окон Века рама/створка Semperit
Профессиональный притворный уплотнитель Oras Veka 254 ..

Уплотнитель оконный Semperit КБЕ 227 черный
Резиновый уплотнитель для пластиковых окон из непористой рез..

Уплотнитель притвора Semperit Рехау, Монблан усиленный черный
Притворный профессиональный уплотнитель для пластиковых окон..

Уплотнитель для окон ПВХ КБЕ 228 усиленный черный Semperit
Немецкий уплотнитель Semperit для окон из непористой резины ..

Уплотнитель для окон Schlegel Q-Lon 4465 черный для окон Века
Цена указана за погонный метр. Продаем на метраж в любом кол..

Уплотнитель для пластиковых окон Schlegel Q-Lon 4465 серый
Цена указана за погонный метр. Технические данные Уплотн..

Уплотнитель для окон ПВХ Schlegel Q-Lon 9646 черный
Оконный пенополиуретановый уплотнитель Schlegel Q-lon для пр..

Уплотнитель для окон Schlegel Q-Lon 9646 серый
Оконный пенополиуретановый уплотнитель Schlegel Q-lon для пр..

Уплотнитель для окон ПВХ Schlegel Q-Lon 9646 белый
Оконный пенополиуретановый уплотнитель Schlegel Q-lon для пр..
Уплотнители для пластиковых окон из ПВХ профиля. Продаются метражом на отрез. Оптовые цены запрашивайте на info@okna-comfort.ru
Самые важные качества оконных конструкций — их герметичность и звуконепроницаемость. Благодаря этим свойствам, окна препятствуют проникновению холодного воздуха в квартиру и шума с улицы. Использование некачественных и уже отживших свой срок уплотнителей значительно снижает эти показатели. Магазин Брасс предлагает высококачественные уплотнители для окон ПВХ только известных марок заводов, зарекомендовавших себя с лучшей стороны за долгие годы работы.
Назначение оконной резины
Уплотнительная оконная резина обеспечивает качественный прижим по всему периметру створки независимо от размеров оконного блока. При правильном уходе способен прослужить до 25 лет!
У нас вы можете приобрести оконный уплотнитель для самых разных конструкций и модификаций окна, в том числе и для самых популярных марок — Veka, Rehau и прочих.
Современный оконный уплотнитель имеет технологические и эксплуатационные характеристики уплотнителя, а именно:
- отличную устойчивость к резким перепадам температуры
- высокую стойкость к механическим воздействиям
- низкую остаточную деформацию.
Когда пора менять резину на окнах

Если Ваши пластиковые окна начали продуваться, в доме отчетливо ощущаются сквозняки, значит пришло время поменять уплотнители на окнах ПВХ.
Еще один показатель необходимости замены уплотнителя – срок службы.
Средний срок службы качественного оконного резинового уплотнителя – 8-10 лет.
Китайские уплотнители живут не больше 5 лет.
Как приобрести оконный уплотнитель
К каждому оконному профилю необходимо подбирать уплотнитель определенной марки. В этом случае взаимозаменяемость не всегда возможна.
Замена оконного уплотнителя на пластиковых окнах – несложный процесс, его можно выполнить своими руками.
Мы предлагаем уплотнители для разных оконных систем. Для пластиковых и для алюминиевых окон. Различной цветовой гаммы- черные, белые, серые.
За отрезной и мерный товар взимается предварительная оплата в размере не менее 50% от стоимости товара. Согласно Постановления Правительства РФ от 19.01.1998 N 55 (ред. от 30.05.2018) товары, отпускаемые на метраж, не подлежат обмену и возврату.
Виды и способы монтажа уплотнителя на окна из дерева
Деревянные оконные конструкции позволяют поддерживать в помещении оптимальный микроклимат и помогают воссоздать гармоничный и привлекательный интерьер. Но при долгой эксплуатации окон из натурального дерева теряется теплосберегающая способность. В настоящий момент тепло в помещении может сберечь уплотнитель для деревянных окон. Рассмотрим особенности этого изоляционного материала.
Виды уплотнителей
Многие обыватели помнят ритуал, который их мамы и бабушки выполняли каждую осень, – заклеивание окон. Для этого нужно было нарезать полоски одинаковой ширины, намазать их хозяйственным мылом или клистиром, сваренным из муки, и оклеить рамы по периметру. Весной приходилось все отмывать.

Заклеенное окно нельзя открыть до наступления тепла
Немного позже появилась самоклеящееся бумага и процесс утепления окон упростился. Но у этих способов был один неоспоримый недостаток: начиная с осени и до поздней весны открыть створки окон было невозможно.
В последнее время на рынке появился большой выбор уплотнительного материала для окон из дерева, но прежде чем приступить к утеплению оконных конструкций, стоит изучить предложения. Стоит понимать, что уплотнители могут быть произведены из различного материала. Помимо этого, они отличаются по способу монтажа и профилю.
По методу монтажа ленты можно разделить на:
- утеплители с самоклеящейся лентой;
- монтируемые на клей;
- уплотнители, устанавливаемые в паз.
От конфигурации утеплителя и его сечения зависит плотность прилежания створки к рамной конструкции. Толстый уплотнительный профиль не даст закрыть окно, а слишком тонкий не обеспечит должного прижатия.

Уплотнительные профили различаются по материалу изготовления и способу монтажа
От вида материала для окон из дерева зависит, как будет работать вся конструкция, поэтому выбирается уплотнитель для каждого отдельного случая.
Уплотнительные профили бывают:
- D — профиль до 11 мм для крупных зазоров;
- P — сечение масштабом 3-7 мм для люфтов среднего размера;
- E, V — профиль до 3 мм для промежутков небольших габаритов;
- C, I — сечение до 1 мм для зазоров маленького размера.
От материала выработки ленты и его технических характеристик напрямую зависит прилегание створок и срок службы уплотнительных профилей.
-
Уплотнители из поролона применяются для сохранения тепла в жилых помещениях. Стоит отметить, что срок службы этого материала очень ограничен, так как он хрупкий и невлагостойкий. Эффективно его эксплуатировать можно в течение одного сезона. Эти утеплители имеют максимальную толщину и производятся с клейкой лентой или без.
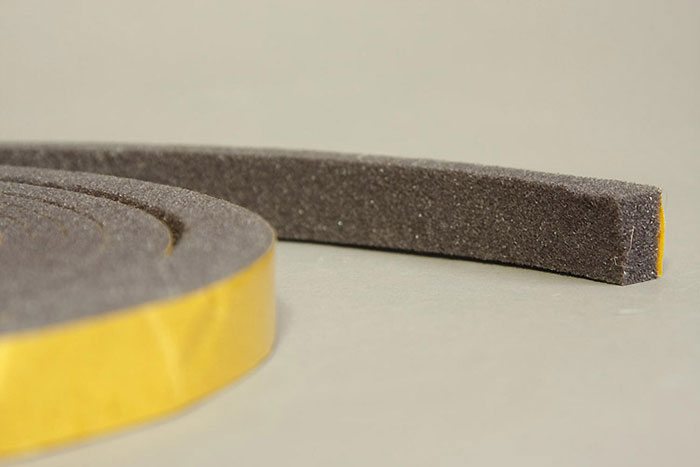
Поролоновая уплотнительная лента потребует замены уже после одного сезона
Полиэтиленовые уплотнители применяются, так же как и предыдущий вид, но у них есть преимущества, они влагостойкие, долго служат и хорошо восстанавливают форму, могут быть самоклеящимися.

Полиэтиленовые уплотнители устойчивы к влаге
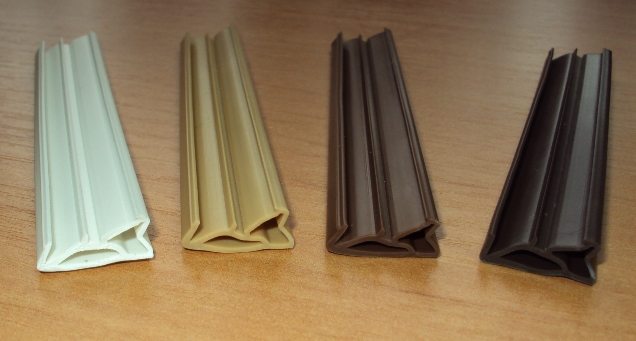
Самые прочные и долговечные уплотнители изготавливаются из резины
Они являются наиболее качественными и надежными, в основе материала изготовления лежит этилен пропиленовый или кремнийорганический каучук, хлоропрен или полимер. Особое внимание хочется уделить новейшему материалу – термопластичному эластомеру.
Как выбрать уплотнитель?
Перед тем как отправляться за покупкой уплотнителя, обязательно сделайте замеры зазоров между створкой и рамой, только так вы сможете подобрать профиль нужного сечения.
Перед покупкой прочитайте информацию на упаковке удостоверьтесь, что уплотнитель изготовлен из того материала, который вам необходим, каким способом он устанавливается, есть ли на нем клейкая лента или вам придется дополнительно купить клей.
Обратите внимание также на дату изготовления, так как у просроченного товара существенно снижается время эксплуатации.
При выборе стоит обратить внимание на производителя, покупать нужно только ту продукцию, на которую у производителя есть товарный сертификат. Если выбор пал на товар европейского производства, стоит поинтересоваться, подходит ли он под стандарты SS EN ISO 9001.
Установка уплотнителя своими руками
Как только уплотнитель куплен, его можно установить на окно. Если приобретен самоклеящийся уплотнитель, то монтаж будет производиться следующим образом:
- поверхность окна, где будет устанавливаться уплотнитель хорошо очищается от пыли, грязи. После этого ее нужно обезжирить и тщательно просушить;
- нужно определить место, куда будет установлен уплотнитель – это может быть створка или рама;

Уплотнительная лента может закрепляться на створке или раме

Для крепления обычной уплотнительной ленты используется клей или герметик
Если куплен простой уплотнитель, то нужно позаботиться о способе крепления на раму. Можно применить каучуковый клей или герметик. В остальном же монтаж не отличается от вышеописанного способа. Стоит отметить, что некоторые обыватели практикуют установку подобного утеплителя при помощи степлера. Мы не рекомендуем использовать данный способ, так как поверхность створки со временем теряет вид.
Шведская методика утепления окон
Еще один способ утеплить оконную конструкцию, трудоемкий, но более надежный, чем два предыдущих – пазовый (шведская технология).

Пазовый метод утепления окна – самый надежный
Створки нужно снять с рамы, по их периметру фрезой выбирается фаска под углом 45 градусов в направлении нащельника.

Фаска выбирается фрезой под углом 45 градусов
На месте петель делается нетронутый промежуток на три сантиметра больше размера петли.
Паз следует хорошо очистить от остатков стружки и опилок.
Утеплитель с фальцем устанавливается в фаску и запрессовывается. Для этого нужно купить специальный ролик, который существенно облегчит этот процесс. Не растягивайте трубку утеплителя, ведя ролик в одном направлении, его нужно двигать вперед-назад.

Во время монтажа ленты ролик нельзя двигать в одном направлении
Створки устанавливаются на рамную конструкцию и проверяется качество уплотнения путем закрывания окна.
После установки уплотнителя можно не переживать по поводу холодов зимой, кроме этого, уплотнитель будет выполнять звукоизоляционные функции.
Замена уплотнителя на деревянных окнах производится просто: лента снимается с конструкции, места ее пребывания очищаются и обезжириваются, рама готова к монтажу новой уплотнительной ленты.





